
www.engineering-korea.com
30
'26
Written on Modified on
dSPACE·MathWorks, RoadRunner와 ASM OpenX 직접 연동
오픈 표준 기반 직접 모델 연계를 통해 자율주행 교통 시뮬레이션 효율과 신뢰성을 향상.
www.dspace.com
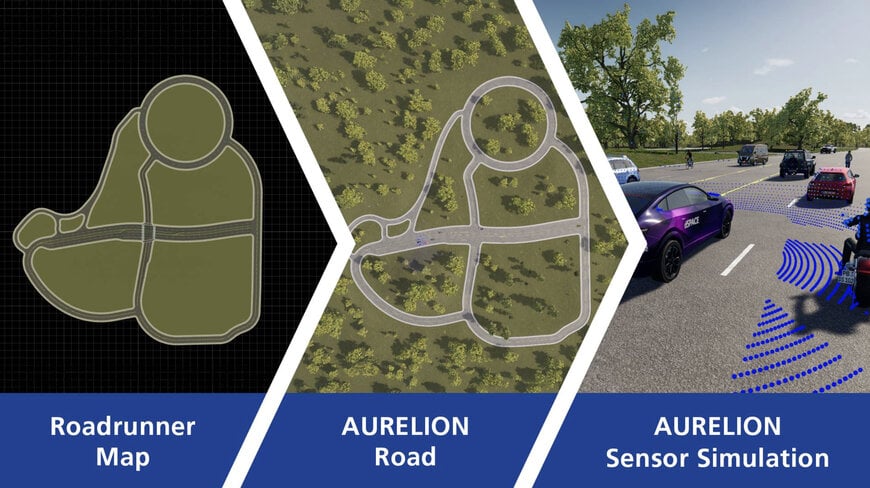
dSPACE와 MathWorks는 자율주행 차량 개발을 위한 교통 시뮬레이션 효율을 높이기 위해 파트너십을 확대했다. 이번 협력을 통해 MathWorks의 RoadRunner에서 생성한 도로 모델을 dSPACE의 차세대 교통 모델인 ASM OpenX에서 직접 사용할 수 있게 됐다.
ASM OpenX는 OpenDRIVE와 OpenSCENARIO XML과 같은 오픈 표준을 네이티브로 지원하는 dSPACE의 차세대 트래픽 모델이다. 기존 ASM 트래픽 모델에서 필요했던 시나리오 및 도로 모델 파일 변환 과정이 제거되면서, 오류 발생 가능성과 수작업으로 인한 비효율이 크게 줄어들었다.
이 직접 연동을 통해 엔지니어는 RoadRunner에서 설계한 도로 모델과 시나리오를 변환 없이 ASM OpenX 기반 시뮬레이션 환경에 적용할 수 있다. 이를 통해 다양한 도로 구성과 운행 설계 영역(ODD)에서 교통 시나리오를 보다 효율적이고 비용 효과적으로 시뮬레이션할 수 있다.
RoadRunner는 상세한 도로 모델, 3D 씬, 시나리오 설계를 위한 대화형 에디터로, 프로그래밍 API를 제공한다. OpenDRIVE와 OpenSCENARIO 표준을 지원하며, 특히 OpenDRIVE 기반 도로 모델링에서 ASM OpenX를 보완하는 도구로 활용된다.
dSPACE와 MathWorks는 이번 연계를 통해 시뮬레이션 툴체인을 단순화하고, 자율주행 시스템 개발에서 요구되는 안전성 및 신뢰성을 보다 효율적으로 검증할 수 있다고 설명했다. 오픈 표준을 중심으로 한 이번 협력은 기존 차량과 차세대 자율주행 시스템 모두에 적용 가능한 실용적인 시뮬레이션 환경을 제공하는 기술적 진전으로 평가된다.
www.dspace.com
